
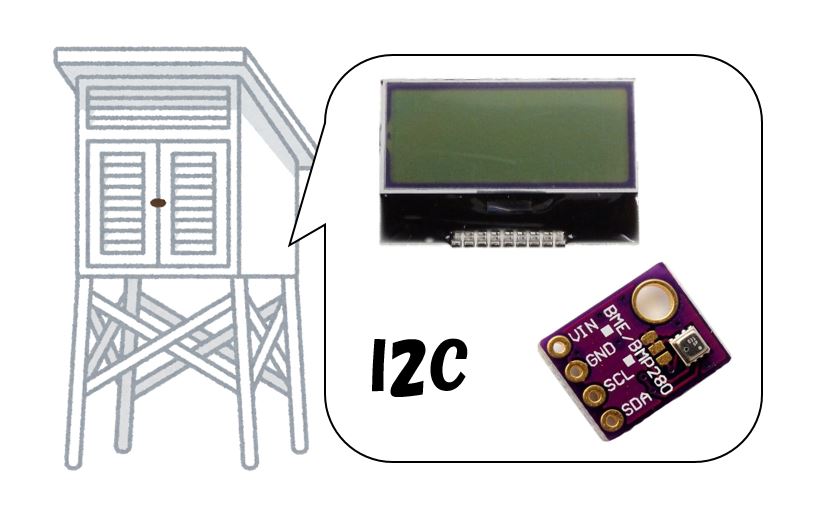
ArduinoでBME280とLCDの動作確認
前回に引き続き温湿度気圧計を作っていきます。
今回の記事はArduinoでの動作確認を行っていこうと思います。あと、前回の構想の時に抜けていた所(スリープ方法など)も触れながら進めていこうと思います
回路構成
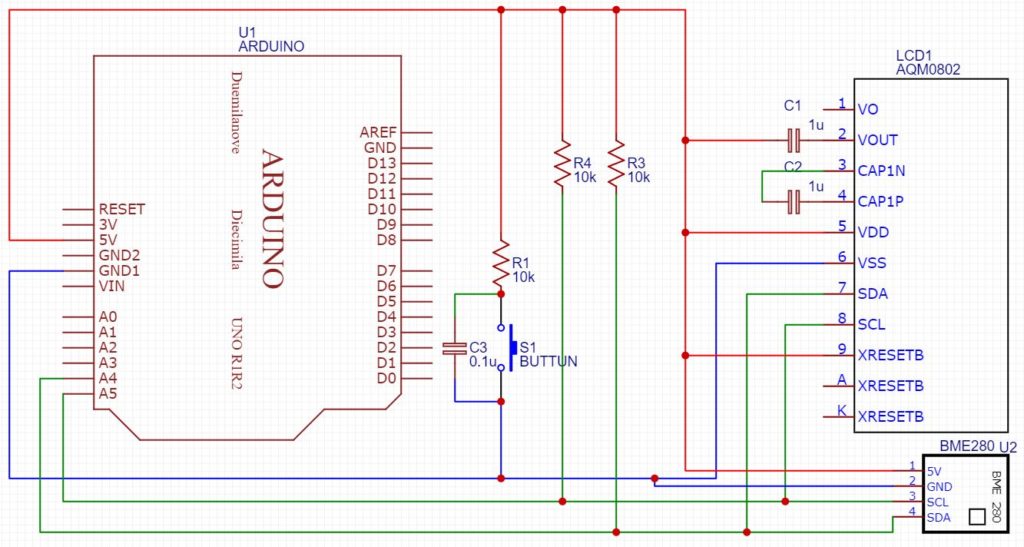
回路図になります。今回使用するLCDはモジュール化していない裸の物を使用するために昇圧回路のコンデンサを取り付ける必要があります。
また、5V電源からとってきていますが、LCDドライバの設定で昇圧をOFFにしております。
その他はI2Cラインをプルアップするだとか、スイッチのチャタリング防止にコンデンサ入れるだとか位なので回路的には難しいところはないと思います。
ソフト
機能構想修正
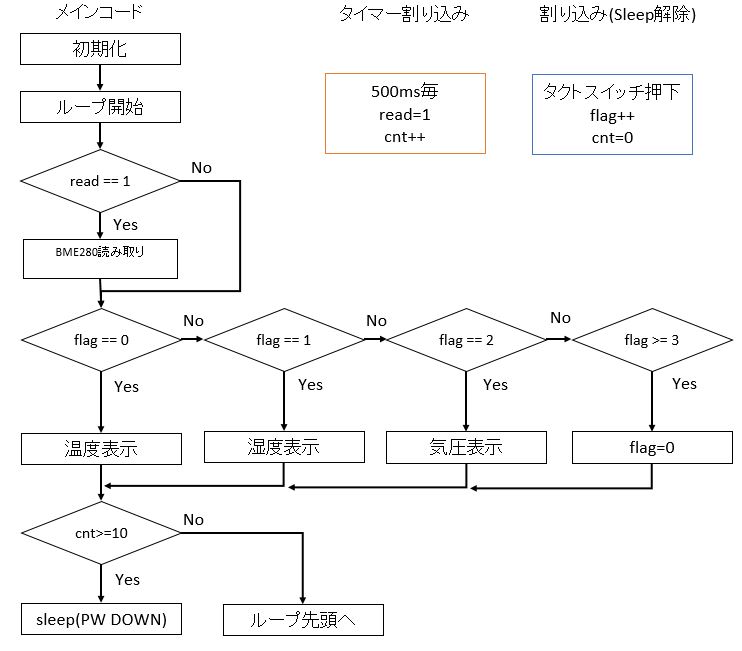
スリープ機能のフローを追加しました。動作としては画面表示後10タイマ割り込みサイクル中に画面切り替えの動作がなかったらスリープします。復帰はタクトスイッチ押下です。
めちゃシンプル。スリープまでのカウントは前述の通りタイマ割り込み中にカウンタを設けています。割り込みボタンが押されたらカウントがリセットされる仕組み。
コード
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 140 141 142 143 144 145 146 147 148 149 150 151 152 153 154 155 156 157 158 159 160 161 162 163 164 165 166 167 168 169 170 171 172 173 174 175 176 177 178 179 180 181 182 183 184 185 186 187 188 189 190 191 192 193 194 195 196 197 198 199 200 201 202 203 204 205 206 207 208 209 210 211 212 213 214 215 216 217 218 219 220 221 222 223 224 225 226 227 228 229 230 231 232 233 234 235 236 237 238 239 240 241 242 243 244 245 246 247 248 249 250 251 252 253 254 255 256 257 258 259 260 261 262 263 264 265 266 267 268 269 270 271 272 273 274 275 276 277 278 279 280 281 282 283 284 285 286 287 288 289 290 291 292 293 294 295 296 297 298 299 300 301 302 303 304 305 306 307 308 309 310 311 312 313 314 315 316 317 318 319 320 321 322 323 324 325 326 327 328 329 330 331 332 333 334 335 336 337 338 339 340 341 342 343 344 345 346 347 348 349 350 351 352 353 354 355 356 357 358 359 360 361 362 363 364 365 366 367 368 369 370 371 372 373 374 375 376 377 378 379 380 381 382 383 384 385 386 387 388 389 390 391 392 393 394 395 396 397 398 399 400 401 402 403 404 405 406 407 408 409 410 411 412 413 414 415 416 417 418 419 420 421 422 423 424 425 426 427 428 429 430 |
#include <Wire.h> #include <MsTimer2.h> #include <avr/sleep.h> #define ADDRESS 0x76 //BME280アドレスGND接続 #define ST7032i_ADDRESS 0b0111110 //ST7032iアドレス #define Command 0b00000000 //Co:0/Rs:0 #define Address 0b01000000 //Co:0/Rs:1 //生データ格納用 unsigned long int hum_raw, temp_raw, pres_raw; signed long int t_fine; uint16_t temp, pres, hum; uint16_t m,n; //補償係数 uint16_t dig_T1, dig_P1; int16_t dig_T2, dig_T3, dig_P2,dig_P3,dig_P4,dig_P5,dig_P6, dig_P7,dig_P8,dig_P9,dig_H2,dig_H4,dig_H5; int8_t dig_H1,dig_H3,dig_H6; //割り込みフラグ volatile uint8_t x=0;//割り込みフラグ uint8_t y,z;//チャタリング防止用 //タイマ割り込みフラグ volatile bool k=0; //スリープまでのカウント volatile uint8_t scnt; //BME280モード uint8_t mode00 =0b00; //00:スリープ uint8_t mode01 =0b01; //01:強制測定 uint8_t mode11 =0b11; //11:通常測定 //BME280補償係数読み取り void readCompensation_factor() { uint8_t data[32], i = 0; Wire.beginTransmission(ADDRESS); Wire.write(0x88); Wire.endTransmission(); Wire.requestFrom(ADDRESS, 25); while (Wire.available()) { data[i] = Wire.read(); i++; } Wire.beginTransmission(ADDRESS); Wire.write(0xE1); Wire.endTransmission(); Wire.requestFrom(ADDRESS, 7); while (Wire.available()) { data[i] = Wire.read(); i++; } dig_T1 = (data[1] << 8) | data[0]; dig_T2 = (data[3] << 8) | data[2]; dig_T3 = (data[5] << 8) | data[4]; dig_P1 = (data[7] << 8) | data[6]; dig_P2 = (data[9] << 8) | data[8]; dig_P3 = (data[11] << 8) | data[10]; dig_P4 = (data[13] << 8) | data[12]; dig_P5 = (data[15] << 8) | data[14]; dig_P6 = (data[17] << 8) | data[16]; dig_P7 = (data[19] << 8) | data[18]; dig_P8 = (data[21] << 8) | data[20]; dig_P9 = (data[23] << 8) | data[22]; dig_H1 = data[24]; dig_H2 = (data[26] << 8) | data[25]; dig_H3 = data[27]; dig_H4 = (data[28] << 4) | (0x0F & data[29]); dig_H5 = (data[30] << 4) | ((data[29] >> 4) & 0x0F); dig_H6 = data[31]; } //BME280書き込み void writeBME280(uint8_t reg_address, uint8_t data) { Wire.beginTransmission(ADDRESS); Wire.write(reg_address); Wire.write(data); Wire.endTransmission(); } //BME280読み込み void readBME280() { int i = 0; uint32_t data[8]; Wire.beginTransmission(ADDRESS); Wire.write(0xF7); Wire.endTransmission(); Wire.requestFrom(ADDRESS, 8); while (Wire.available()) { data[i] = Wire.read(); i++; } pres_raw = (data[0] << 12) | (data[1] << 4) | (data[2] >> 4); temp_raw = (data[3] << 12) | (data[4] << 4) | (data[5] >> 4); hum_raw = (data[6] << 8) | data[7]; } //分解能:0.01℃, 返り値は小数点2桁の整数で返されるので100で割っている。 signed long int BME280_compensate_T(signed long int adc_T) { signed long int var1, var2, T; double temp; var1 = ((((adc_T >> 3) - ((signed long int)dig_T1 << 1))) * ((signed long int)dig_T2)) >> 11; var2 = (((((adc_T >> 4) - ((signed long int)dig_T1)) * ((adc_T >> 4) - ((signed long int)dig_T1))) >> 12) * ((signed long int)dig_T3)) >> 14; t_fine = var1 + var2; T = ((t_fine * 5 + 128) >> 8); return T; } //出力値96386.2Pa = 963.862hPaに相当します。。 unsigned long int BME280_compensate_P(signed long int adc_P) { signed long int var1, var2; unsigned long int P; var1 = (((signed long int)t_fine) >> 1) - (signed long int)64000; var2 = (((var1 >> 2) * (var1 >> 2)) >> 11) * ((signed long int)dig_P6); var2 = var2 + ((var1 * ((signed long int)dig_P5)) << 1); var2 = (var2 >> 2) + (((signed long int)dig_P4) << 16); var1 = (((dig_P3 * (((var1 >> 2) * (var1 >> 2)) >> 13)) >> 3) + ((((signed long int)dig_P2) * var1) >> 1)) >> 18; var1 = ((((32768 + var1)) * ((signed long int)dig_P1)) >> 15); if (var1 == 0) { return 0; } P = (((unsigned long int)(((signed long int)1048576) - adc_P) - (var2 >> 12))) * 3125; if (P < 0x80000000) { P = (P << 1) / ((unsigned long int) var1); } else { P = (P / (unsigned long int)var1) * 2; } var1 = (((signed long int)dig_P9) * ((signed long int)(((P >> 3) * (P >> 3)) >> 13))) >> 12; var2 = (((signed long int)(P >> 2)) * ((signed long int)dig_P8)) >> 13; P = (unsigned long int)((signed long int)P + ((var1 + var2 + dig_P7) >> 4)); return P; } //出力値4744=47.44% unsigned long int BME280_compensate_H(signed long int adc_H) { signed long int v_x1; v_x1 = (t_fine - ((signed long int)76800)); v_x1 = (((((adc_H << 14) - (((signed long int)dig_H4) << 20) - (((signed long int)dig_H5) * v_x1)) + ((signed long int)16384)) >> 15) * (((((((v_x1 * ((signed long int)dig_H6)) >> 10) * (((v_x1 * ((signed long int)dig_H3)) >> 11) + ((signed long int) 32768))) >> 10) + (( signed long int)2097152)) * ((signed long int) dig_H2) + 8192) >> 14)); v_x1 = (v_x1 - (((((v_x1 >> 15) * (v_x1 >> 15)) >> 7) * ((signed long int)dig_H1)) >> 4)); v_x1 = (v_x1 < 0 ? 0 : v_x1); v_x1 = (v_x1 > 419430400 ? 419430400 : v_x1); return (unsigned long int)(v_x1 >> 12); } //BME280初期設定 void init(uint8_t mode){ // BME280 initial uint8_t osrs_t = 0b001; //温度オーバーサンプリング x 1 uint8_t osrs_p = 0b001; //気圧オーバーサンプリング x 1 uint8_t osrs_h = 0b001; //湿度オーバーサンプリング x 1 uint8_t t_sb = 0b000; //待機時間 0.5ms uint8_t filter = 0b000; //フィルタオフ uint8_t spi3w_en = 1; //4線SPI uint8_t ctrl_meas_reg = (osrs_t << 5) | (osrs_p << 2) | mode; uint8_t ctrl_meas_reg_s = (osrs_t << 5) | (osrs_p << 2) | mode; uint8_t config_reg = (t_sb << 5) | (filter << 2) | spi3w_en; uint8_t ctrl_hum_reg = osrs_h; writeBME280(0xF2, ctrl_hum_reg); writeBME280(0xF4, ctrl_meas_reg); writeBME280(0xF5, config_reg); } //LCD制御コマンド書き込み void commWrite(byte cData){ Wire.beginTransmission(ST7032i_ADDRESS); Wire.write(Command); Wire.write(cData); Wire.endTransmission(); delay(10); } //LCD描画データ書き込み void dataWrite(byte dData){ Wire.beginTransmission(ST7032i_ADDRESS); Wire.write(Address); Wire.write(dData); Wire.endTransmission(); delay(10); } //LCD初期化 void dispInit(){ delay(50); commWrite(0x38);//Function set:8bit-bus,2line-display delayMicroseconds(30); commWrite(0x39);//external table use delayMicroseconds(30); commWrite(0x14);//VDD3V:183Hz/VDD5V:192Hz delayMicroseconds(30); commWrite(0x73);//コントラストC3,C2,C1,C0 delayMicroseconds(30); commWrite(0x52);//ICON-off/内部昇圧回路-off/コントラストC5,C4 delayMicroseconds(30); commWrite(0x6C);//内部フォロワ回路off,V0の増幅比 delay(250); commWrite(0x38);//Function set:8bit-bus,2line-display delayMicroseconds(30); commWrite(0x0C);//display-on/cursor-off/画面反転-off delayMicroseconds(30); commWrite(0x01); } //LCDリセット void dispReset (){ commWrite(0x08);//display-off/cursor-off/画面反転-off delayMicroseconds(30); commWrite(0x01); } //LCD温度描画 void lcdTemp(uint16_t ltemp){ commWrite(0b10000000); dataWrite(0b10110000|0b0101);// オ dataWrite(0b11010000|0b1101);// ン dataWrite(0b11000000|0b0100);// ト dataWrite(0b11010000|0b1110);// ゛ commWrite(0b11000000); m=10000; n=1000; for(int i=0;i<2;i++){//整数 dataWrite(0b00110000|(ltemp%m/n)); m=m/10; n=n/10; } commWrite(0b11000010); dataWrite(0b00100000|0b1110);//点 commWrite(0b11000011); m=100; n=10; for(int i=0;i<2;i++){//少数 dataWrite(0b00110000|(ltemp%m/n)); m=m/10; n=n/10; } commWrite(0b11000101); dataWrite(0b11010000|0b1111);// ゜ dataWrite(0b01000000|0b0011);// C dataWrite(0b10100000|0b0000);// "" } //LCD湿度描画 void lcdHumi(uint16_t lhum){ commWrite(0b10000000); dataWrite(0b10110000|0b1100);// シ dataWrite(0b11000000|0b0010);// ツ dataWrite(0b11000000|0b0100);// ト dataWrite(0b11010000|0b1110);// ゛ commWrite(0b11000000); m=100000; n=10000; for(int i=0;i<2;i++){//整数 dataWrite(0b00110000|(lhum%m/n)); m=m/10; n=n/10; } commWrite(0b11000010); dataWrite(0b00100000|0b1110);//点 commWrite(0b11000011); m=10000; n=1000; for(int i=0;i<3;i++){//少数 dataWrite(0b00110000|(lhum%m/n)); m=m/10; n=n/10; } commWrite(0b11000110); dataWrite(0b00100000|0b0101);//% dataWrite(0b10100000|0b0000);// "" } ////LCD気圧描画 void lcdPres(uint16_t lpres){ commWrite(0b10000000); dataWrite(0b10110000|0b0111);// キ dataWrite(0b10110000|0b0001);// ア dataWrite(0b11000000|0b0010);// ツ dataWrite(0b10100000|0b0000);// "" commWrite(0b11000000); m=10000; n=1000; for(int i=0;i<4;i++){//整数 dataWrite(0b00110000|(lpres%m/n)); m=m/10; n=n/10; } commWrite(0b11000100); dataWrite(0b01100000|0b1000);//h dataWrite(0b01010000|0b0000);//P dataWrite(0b01100000|0b0001);//a } void setup() { Serial.begin(9600); Wire.begin();//マスター設定 dispInit();//LCD初期化 init(mode00);//BME280強制読み取りモード readCompensation_factor();//BME280補償係数読み出し attachInterrupt(0, state, LOW);//割り込み設定 MsTimer2::set(1000, timerFire);//タイマ割り込み設定 MsTimer2::start();//タイマ割り込み開始 } //モーメンタリスイッチ割り込み void state(){ x=1; scnt=0;//スリープ待機カウントリセット Serial.println("intrrupt"); } //チャタリング防止分岐 void update_state(){ static uint32_t cnt; switch (x){ case 0: return; case 1: x=2; cnt=2;//チャタリング防止カウンタ return; case 2: cnt--; if(cnt==0){ y=1; x=0; } return; } } //タイマ割り込み関数フラグ切り替えのみ void timerFire(){ k = !k; scnt++;//スリープまでのカウント } void loop() { //タイマ割り込みにより強制測定 while(k){ init(mode01);//強制測定モード readBME280(); temp = BME280_compensate_T(temp_raw); pres = BME280_compensate_P(pres_raw)/100; hum = BME280_compensate_H(hum_raw); Serial.print("温度 : ");Serial.print(temp);Serial.print("℃ "); Serial.print("気圧 : ");Serial.print(pres);Serial.print("hpa "); Serial.print("湿度 : ");Serial.print(hum);Serial.println("% "); k=!k; } //モーメンタリスイッチ押下検知 update_state(); if(y){ z++; y=0; } //押下回数による機能切り替え switch(z){ case 0: lcdTemp(temp); break; case 1: lcdHumi(hum); break; case 2: lcdPres(pres); break; case 3: z=0; break; } //スリープモード条件 uint8_t r=0; while(scnt>=8){ switch (r){ case 0: commWrite(0x01); r=1; break; case 1: commWrite(0b11000000); dataWrite(0b01110000|0b0011);//s dataWrite(0b01100000|0b1100);//l dataWrite(0b01100000|0b0101);//e dataWrite(0b01100000|0b0101);//e dataWrite(0b01110000|0b0000);//p dataWrite(0b00100000|0b1110);//. dataWrite(0b00100000|0b1110);//. dataWrite(0b00100000|0b1110);//. break; } if(scnt>=10){ dispReset();//ディスプレイクリア&off set_sleep_mode(SLEEP_MODE_PWR_DOWN); MsTimer2::stop();//タイマ割り込み禁止 sleep_mode();//スリープ実行 //スリープ復帰。こっから開始。 dispInit();//ディスプレイ初期化 MsTimer2::start();//タイマ割り込み再開 } } } |
ライブラリを使用していないのでめっーーーーーちゃダラダラ書いています。(どこか簡単に置き換えられる所あったらご教授お願いしますm(__)m)
一から解説は長くなるのでやめておきますが、一つだけ頭を使ったのはLCDに値を表示する際に温度と湿度、気圧で得られる文字数と小数点の位置が異なるのでforループと剰余・除算で一個づつ分解しています。このやり方が一般的なのか不明ですが、一応動きます。
あと、忘れがちなのですがスリープ前にはタイマ割り込みは停止しましょう、スリープモードに入ってもタイマ割り込みですぐに復帰してしまいます。
もう一つ、こだわりがありましてスリープに入る2カウント前に画面をリセットして[sleep]と表示させています。
動作確認
補足
今回スリープモードとして【SLEEP_MODE_PWR_DOWN】を使用しています。外部割込みやWDT、リセット以外では復帰しない最も深いスリープモードです。その分消費電力も最小になるそうです。
確認のためにUSB電流計で消費電流を測定してみました。


左がスリープ前(50mA), 右がスリープ後(20mA)です60%くらい消費電力が減りました。
でもスリープ状態でも20mAあるのは結構大きいですね。スリープ状態でもUNO上のいくつかのLEDはつきっぱなしだったのでそこらへんも関係しているのかな?ATtiny85に実装の際にはここら辺もう少し詰めていきます。
おわりに
基本的な動作はこの記事の動作で完結いたします。
次からはATtiny85に移行するにあたってのコードのリバイスとハード側(筐体)の加工を進めていこうと思います。
ではでは~
次回記事

コメント